What is OpenMMS all about? Check out the project video to find out!
Small, lightweight mobile mapping systems (MMS), especially those installed on remotely piloted aircraft systems (RPAS/UAS), have gained a lot of interest in academic research and commercial industries. The Open Mobile Mapping System project, code-named OMMS (Ω) project, is an innovative open-source software and hardware research initiative. The project aims to provide an interested user with the necessary theoretical knowledge, technical knowledge, and hands-on skills to make, calibrate, and operate their own professional mobile mapping system. This project presents a single source of information that lists every nut, bolt, OEM sensor, and manufacturing step required to build a modern, tightly-integrated MMS sensor. The project also includes a robust suite of novel open-source software applications that rigorously process the collected data and generate industry-standard geospatial deliverables.* The system’s firmware, calibration procedures, and quality control workflows also utilize newly developed open-source software.
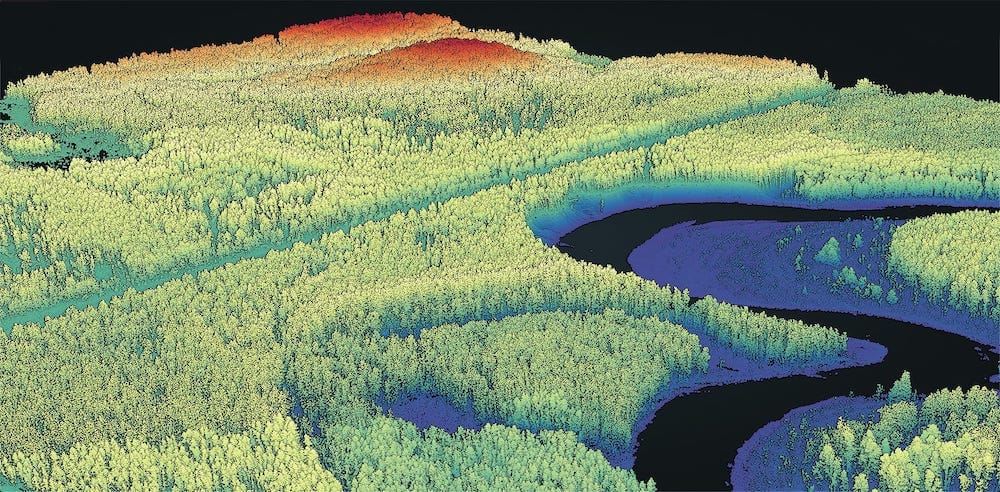
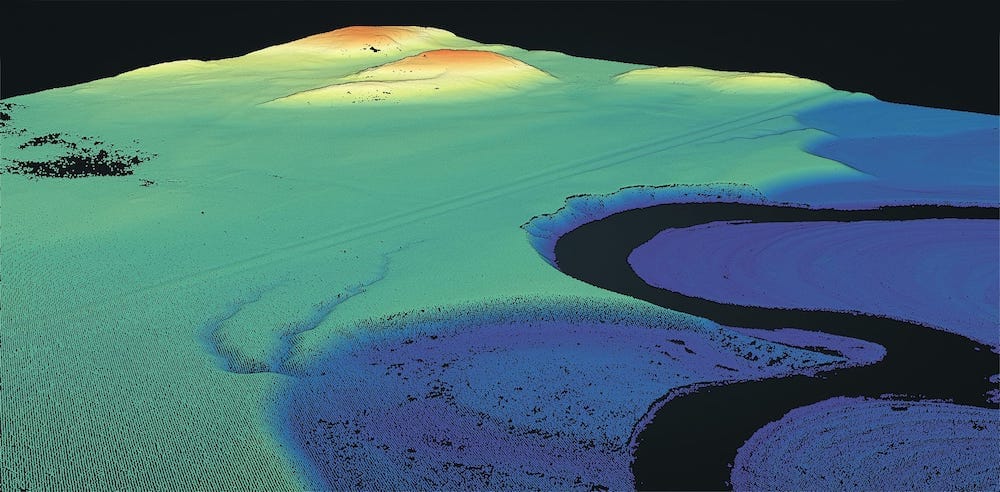
The complete OpenMMS solution provides many of the same features and achieves the same (or better) accuracy specifications as comparable commercial systems. The hardware combines a lidar sensor, global navigation satellite system sensors, an inertial sensor, cameras, and computers, to create a tightly-integrated digital mapping tool. The software is easy to use, fast, supports multiple OS, and, when possible, leverages multi-core (CPU) and graphics card (GPU) processing.
The long term OpenMMS project goals are to:
- Attract science and engineering researchers from both academia and private industry to contribute ideas, discuss new applications, and develop system improvements in an effort to advance the science and technology of digital mapping.
- Provide an independent means for any person interested in mobile mapping systems, applications, or development, with the hardware, software, and necessary knowledge to pursue their research goals.
- Entice sensor manufacturers to want their products to be integrated into the OpenMMS project, thus providing different accuracy and cost options for users and, in turn, new customers for the manufacturers.
- Expand and evolve the OpenMMS open-source hardware and software as new relevant research is performed, and new relevant technologies become commercially available.
- Provide one-on-one and community-based technical support for interested users.

* Commercial GNSS-Inertial processing software is required as part of the workflow.